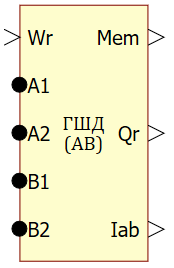
The block simulates a hybrid two-phase stepper motor. The model is used in conjunction with elements of libraries and Mechanics.
The model of the motor windings is made on the basis of R-L elements and EMF sources.
The motor torque is calculated by the following formula:
where:
iA, iB — phase currents,
ψR — rotor flux linkage,
θR = ωRt — rotor rotation angle,
Zp = 90°/Step — number of pole pairs (Step - rotor step in degrees),
Td — maximum value of the tooth torque.
The output signal of the motor electromagnetic torque "Mem" should be applied to the model of the mechanical part of the electrical drive, built on the elements of the Mechanic section. In general, the motion of the motor rotor is described with the equation:
where:
Mem — electromagnetic torque of the motor,
Mload — torque created by the load,
J — the total moment of inertia applied to the rotor (the sum of the moment of inertia of the load and the moment of inertia of the rotor).
The model of the mechanical part of the electrical drive converts the signal of the electromagnetic torque into the value of the angular speed of the rotor "Wr", supplied to the corresponding input of the motor model.