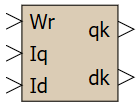
The block makes it possible to make the current control channels along the axes d and q independent of each other by generating cross-compensation signals. The value of the compensation voltages can be calculated in absolute or relative units.
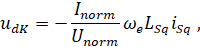
The output signals of the block are calculated by the formulas:
where:
iSq, iSd — projections of the stator current vector on the d and q axes,
Inorm, Unorm — normalizing values of current and voltage,
LSd, LSd — inductances along the axes d and q,
ψf — rotor flux linkage,
ωe — angular speed of the stator field.
When the "Inorm" and"Unorm" properties areset to "1", the compensation voltages will be calculated in absolute units.