The block implements a mathematical model of an adaptive regulator with a reference model.
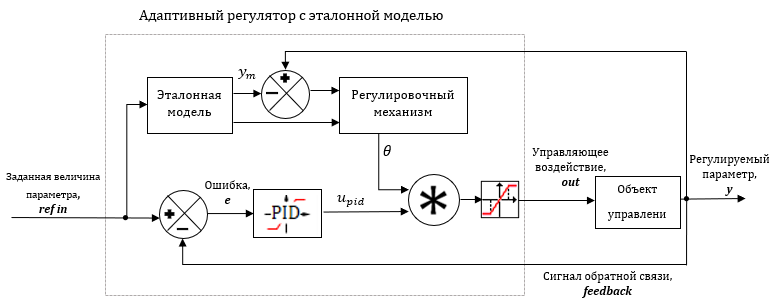
The block is a submodel, the structural diagram of which as part of the closed-loop system is shown in the figure (Figure 1):
Figure 1. Structural diagram of a closed-loop system and an adaptive regulator with a reference model.
The output signal of the PID controller with saturation compensation is:
if D-term filtering is not used, then:
if D-term filtering is used, then:
where Kp, Ki, Kd are the gains of the proportional, integrating and differentiating terms of the regulator, respectively, T is the sampling period, Tdif is the derivative time constant, e is the error signal, k is the simulation step number.
The reference model reflects the desired behavior of the closed-loop system. The transfer function of the reference model is as follows:
where N(z), L(z) are the polynomials of the numerator and denominator of the transfer function, determined by the coefficients ai, b i (i = 0..n, j = 0..m, n ≥ m, an ≠ 0).
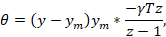
The regulator corrects the control action based on the error between the output data of the control object and the output data of the reference model:
where y is the output of the control object, ym is the output of the reference model, γ is the learning rate coefficient, an increase in the value of which leads to a faster adaptation of the model to changes.
The control corrected output signal is:
Input ports
ref in – setting action signal;
feedback – feedback signal.
Output ports
out – controlling action signal.
Properties
Discrete PID controller with saturation compensation
Sampling period – block calculation sampling period;
Initial conditions – vector of initial values yi(0) of the block output quantity;
Proportional term – gain value of the P-term;
Integral term – gain value of the I-term;
Differential term – the value of the gain of the D-term;
Use D-term filtering – checkbox (flag) that includes additional D-component settings;
Derivative time constant – the property is available if the "Use D-term filtering" item is activated;
Linear with saturation
Minimum value – the minimum value of the output;
Maximum value – maximum output value;
Feedback gain – scalar multiplier for the input value;
Reference model
Numerator coefficients – vector b, dimension [m];
Denominator coefficients – vector a, dimension [n];
Initial conditions – vector of initial values yi(0) of the block output quantity;
Learning rate coefficient – a real number, the speed coefficient of adaptation to changes in the control object.