The block implements a mathematical model of a discrete RST controller.
The block implements a generalized predictive regulator using a polynomial representation to track a given signal. The regulator includes polynomials responsible for:
R – Regulation control;
S – Sensitivity control;
T – Tracking control.
R and S polynomials are designed to achieve the desired control characteristics and T are designed to achieve the desired tracking characteristics.
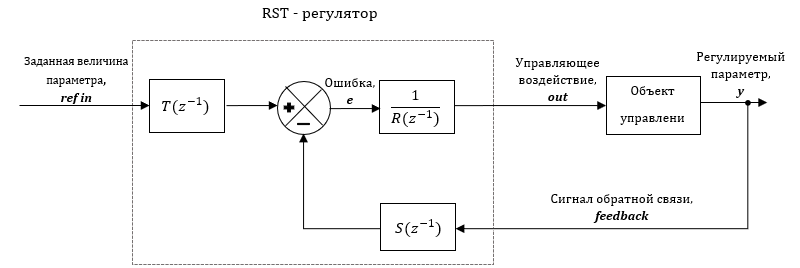
The block is a submodel, the structural diagram of which as part of the closed-loop system is shown in the figure (Figure 1):
Figure 1. Structural diagram of the closed-loop control system (with feedback) equipped with a RST controller.
R, S, T polynomials are given as polynomial functions of the inverse argument:
The output signal of the block is determined according to the following expression:
where k is the simulation step number.
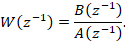
If the transfer function of the object under control is specified as a discrete transfer function of the inverse argument of the form:
Taking into account this expression, the output signal of the control system has the form:
and the transfer function of such a system has the form:
Input ports
ref in – setting action signal;
feedback – feedback signal.
Output ports
out – controlling action signal.
Properties
R polynomial
Denominator coefficients – the vector R of the polynomial, with the dimension [nR];
Initial conditions – vector of initial values of the output value of the block at t=0;
S polynomial
Numerator coefficients – the vector S of the polynomial with dimension [nS];
Initial conditions – vector of initial values of the output value of the block at t=0;
T polynomial
Numerator coefficients – the vector T of the polynomial, with dimension [nT];
Initial conditions – vector of initial values yi(0) of the block output quantity;
Sampling period – block calculation sampling period.