Optimizer
 |
 |
| Vectorized | |
in the palette |
on the schematic |
The optimizer block is intended for picking up such optimization parameters, that would satisfy the required values of optimization criteria
Thus, optimization task might be formulated as finding of the optimization parameters vector at which quality criteria meets their limits.
The optimization problem is difficult to formalize, therefore, in order to obtain any effective results, a set of optimization criteria and parameters having different physical nature and ranges of change must be scaled and converted to normalized values.

- For p = 2, the criterion is quadratic:

- When p tends to infinity, the general criterion is reduced to the largest of the standardized partial criteria (minimax criterion):
- With p = 0, logarithmizing the expression of the general criterion and moving to the limit on p, which tends to zero, after applying the L'Hopital's rule, the average geometric (multiplicative) optimality criterion will be obtained:

Having obtained a generalized criterion, you can begin to solve the optimization problem.
Optimization algorithms
SimInTech implements 5 optimization algorithms most suitable for software implementation, in which the decision to move to a new search point is made on the basis of comparing the values of the criterion at two points.
Algorithm Search-2
An algorithm for dividing the step in half with one optimized parameter (n = 1) and an algorithm for transforming the direction matrix at n > 1 are implemented.
Next, we consider the multivariable search algorithm.
where Λk is a diagonal matrix whose elements are equal to λk = γi if γi ≠ 0, and λk = 0.5 if γi = 0; Pk is an orthogonal matrix.
Multiplication by an orthogonal matrix is necessary to change the set of search directions. If at all stages Pk = i, then the search directions do not change from stage to stage and the algorithm is a coordinate descent algorithm. Obviously, the choice of Pk matrices significantly affects the search efficiency.

- The initial matrix of directions is given by the diagonal one with elements on the main diagonal equal to the initial increments in terms of parameters.
- Running cycle for i = 1, …, n:
- A trial step is performed in the direction of si: y = x + si.
If this step is successful (f(y) < f(x) ), proceed to point c.
- Then a trial step in the opposite direction is performed: y = x − si.
If both trial steps were unsuccessful, λ = 0.5 is taken and the transition to point d is performed.
- Descent is performed in the selected direction, as a result, a new search point x = x + γsi will be obtained, λ = |γ| is taken.
- Accept si = λsi. Go to the next cycle counter value or exit the cycle (if i = n).
- A trial step is performed in the direction of si: y = x + si.
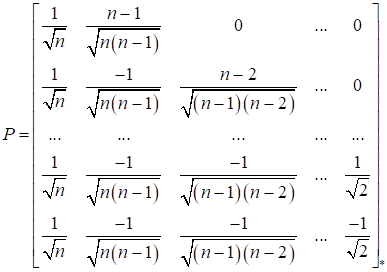
- Multiplication of the matrix of directions S by the orthogonal matrix P given by the expression.
- When the search end condition is met, the algorithm closes, otherwise - the transition to item 2 with the new values of the vector x and the matrix S.
- the goal function has reached the minimum (all requirements are met);
- the specified number of calculations of the goal function is exceeded;
- increments for each of the parameters are less than the set value;
- forced stop.
Algorithm Search-4
The quadratic interpolation algorithm is implemented with one optimized parameter (n = 1) and the algorithm of rotation and stress-strain transformations (n > 1).
Algorithm at n > 1. The algorithm is based on performing stress-strain transformations and rotation transformations for such a transformation of the coordinate system, in which the matrix of the second derivatives (Hessian matrix) approaches the unit one, and the search directions become conjugate. This algorithm uses quadratic interpolation.

each of which is obtained from the previous one by performing the following transformation:

where Λk is a diagonal matrix with elements λi = hii−1/2 (hii are diagonal elements Hk-1); Pk is an orthogonal matrix.
After pre-multiplying and post-multiplying the matrix Hk−1 by Λk, a matrix with unit diagonal elements is obtained. With a suitable choice of orthogonal matrices Pk, the matrix Hk will tend to be the identity matrix. On this, in particular, the method of rotations for calculating the eigenvalues of symmetric matrices is based.
In the problem of finding the minimum of the function of several variables at the k-th stage of the search, the function is alternately minimized in the directions of vectors s1,…, sn, which are columns of the matrix Sk. To find the minimum point in the direction si, quadratic interpolation is used over three equidistant points z = x − asi, x , y = x + asi.


where Λk is a diagonal matrix, the elements of which are determined by the expression; Pk is some orthogonal matrix.
For a quadratic goal function, the matrix SkT H Sk, where H is the Hesse matrix, coincides with the matrix Hk. Thus, with proper selection of matrices Pk for the quadratic function SkT H Sk → i and the search directions approach the conjugates. In the algorithm under consideration, the matrices Pk are equal at all stages and are determined by the formula.
The steps of the Search-4 algorithm are similar to the steps of the Search-2 algorithm discussed above.
Simplex Algorithm
The "flexible polyhedron" method of Nelder and Mead is used.
In the Nelder-Mead method, the function of n independent variables is minimized using n+1 vertices of the flexible polyhedron. Each vertex can be identified by a vector x. The vertex (point) at which the value of f(x) is maximum is projected through the center of gravity (centroid) of the remaining vertices. The improved (smaller) values of the goal function are successively replaced by a point with a maximum value of f(x) for more “good” points until a minimum of f(x) is found.
The essence of the algorithm is summarized below.
Let xi(k) = [xi1(k), …, xij(k), …, x in(k)]T, i = 1, …, n+1, be the i-th vertex (point) at the k-th stage of the search, k = 0, 1, …, and let the value of the goal function in xi(k) be equal to f(xi(k)). Polyhedron vectors that give maximum and minimum values are also noted.
Let f(xh(k)) = max{f(x1(k)), …, f(xn+1(k))},
where xh(k) = xi(k) , and
f(xl(k)) = min{f(x1(k)), …, f(xn+1(k)),
where xl(k) = xi(k).
Since the polyhedron in En consists of (n+1) vertices x1, …, xn+1, let xn+2 be the center of gravity of all vertices except xh.

where index j denotes the coordinate direction.
-
Reflection - designing xh(k) through the center of gravity according to the expression:

where a is the reflection coefficient; xn+2(k) is the center of gravity calculated by the formula; xh(k) is the vertex in which the function f(x) takes the largest of n+1 of its values at the k-th stage.
-
Strain. This operation is as follows: if f(xn+3(k)) <= f(xl(k)), then the vector (xn+3(k) − xn+2(k)) is strained according to the relation:

where g >1 is the strain coefficient.
If f(xn+4(k)) < f(xl(k)) , then xh(k) is replaced by xn+4(k) and the procedure continues again staring from the operation 1 at k = k+1. Otherwise, xh(k) is replaced by xn+3(k) and the transition to operation 1 is also carried out at k = k+1.
- Stress. If f(xn+3(k)) > f(xi(k)) for all i < > h, then the vector (xh(k) − xn+2(k)) is stressed according to the formula:

where 0 < b <1 is the stress coefficient.Then xh(k) is replaced with xn+5(k) and we return to the operation 1 to continue the search at (k+1) step.
- Reduction. If f(xn+5(k)) > f(xh(k)), all vectors (xi(k) − xl(k)), i = 1, …, n +1, are reduced by 2 times starting from xl(k) according to the formula:
Then goes on returning to the operation 1 to continue the search in (k + 1) step.
where e is an arbitrary small number, and f(xn+2(k)) is the value of the goal function in the center of gravity xn+2(k).
- The reflection coefficient a is used to design the vertex with the highest value f(x) through the center of gravity of the flexible polyhedron.
- The coefficient g is introduced to strain the search vector if the reflection gives a vertex with a value f(x) less than the smallest value f(x) obtained before the reflection.
- The stress coefficient b is used to reduce the search vector if the reflection operation did not result in a vertex with a value f(x) less than the second largest (after the largest) value f(x) obtained before reflection.
Thus, by means of strain or stress operations, the dimensions and shape of the flexible polyhedron are scaled so that they satisfy the topology of the problem being solved.
After the flexible polyhedron is suitably scaled, its dimensions must be kept constant until changes in the topology of the problem require the use of a polyhedron of a different shape. The analysis conducted by Nelder and Mead showed that the compromise value is a = 1. They also recommend values of b = 0.5, g = 2. More recent studies have shown that ranges of 0.4 ≤ b ≤ 0.6, 2.8 ≤g ≤ 3.0 are recommended, with 0 < b < 0.4 likely to result in a premature end to the process due to polyhedron flattening, and b›0.6 may require more steps to reach a final solution.
Algorithm for the fastest descent
solving a single-variable minimization problem using some method. In this case, the algorithm is the fastest descent algorithm. If λ is determined by single-variable minimization, then the gradient at the point of the next approximation will be orthogonal to the direction of the previous descent ∇f(x̅)⟂S̅k.
Conjugate gradient method
The fastest descent algorithm uses only the current information about the function f(x̅k) and the gradient ∇f(x̅k) at each search step. The algorithms of conjugate gradients use information about the search at the previous stages of descent.
The search direction S̅k at the current step k is constructed as a linear combination of the fastest descent −∇f(x̅k) at the current step and the descent directions S̅0, S̅1, …, S̅k−1 at previous steps. The weights in the linear combination are selected in such a way as to make these directions conjugate. In this case, the quadratic function will be minimized in n steps of the algorithm.
When selecting weights, only the current gradient and the gradient at the previous point are used.





The search direction S̅2 is constructed as a linear combination of the vectors −∇f(x̅2), S̅0, S̅1, such that it is conjugate to S̅1.
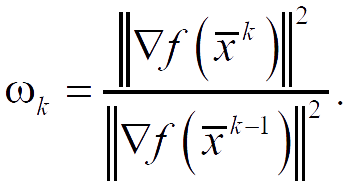
All the weight coefficients preceding ωk, which is especially interesting, turn out to be zero.
- At the initial approximation point x̅0 S̅0 = ∇f(x̅0) is calculated.
- At the k-th step, using a single-variable search in the directionS̅k, the minimum of the function is determined, that is, the problem is solved:

and there is another approximation x̅k+1 = x̅k + λk · S̅k. - f(x̅k+1) и ∇f(x̅k+1) are being calculated.
- The direction S̅k+1 = −∇f(x̅k+1) + ωk+1 · S̅k is being determined.
- The algorithm ends if ||S̅k|| < ε, where ε is a given value.
After n+1 iterations ( k = n), if the algorithm has not been stopped, the procedure is repeated cyclically with the replacement of x̅0 by x̅n+1 and return to the first point of the algorithm. If the initial function is quadratic, then the (n+1)-th approximation will give the extremum point of this function. The described algorithm with plotting of ωk using formulas corresponds to the Fletcher-Reeeves method of conjugate gradient.
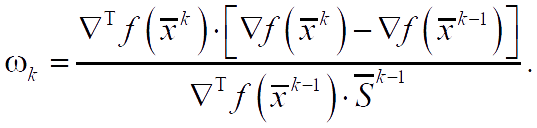
In the case of quadratic functions, both modifications are approximately equivalent. In the case of arbitrary functions, nothing can be said in advance: somewhere one algorithm may be more effective, somewhere another.
Working with the "Optimizer" block
The vector of optimization criteria should be supplied to the input of the "Optimizer" block. Based on these values, using numerical optimization methods, the value of the output vector of optimization parameters is selected so that the values of the criteria are within the required range.
Input Ports
| Parameter name | Description | Communication line type |
|---|---|---|
| in | Optimization criteria vector | Mathematical |
Output Ports
| Parameter | Description | Communication line type |
|---|---|---|
| out | Optimization parameter vector | Mathematical |
Properties
| Title | Parameter | Description | By default | Data type |
|---|---|---|---|---|
| Parameter Optimization Mode | optmode | Optimization is carried out either dynamically during one simulation cycle of the system, changing the optimization parameter directly during the simulation, or by the complete transient process of the system using a series of successive simulation cycles, in each of which the value of the optimized parameter is updated ("By the complete transient process", "In dynamics with stop", "In dynamics continuously") | In dynamics continuously | Enumeration |
| Duration of analysis step for optimization criteria when calculating in dynamics, sec | optstep | How often the criteria will be analyzed during the simulation and, consequently, the value of the optimized parameter will change. The option makes sense only when the dynamic parameter optimization mode is set | 1 | Real |
| Set initial point manually | manualpoint | Checkbox that allows you to set the starting point manually | None | Binary |
| Initial approximation of block outputs | x0 | Initial values of optimized parameters from which the calculation begins | [1] | Array |
| Minimum values of block outputs | ymin | Shows the minimum values that can take the optimized parameters | [0] | Array |
| Maximum values of block outputs | ymax | Shows the maximum values that can take the optimized parameters | [10] | Array |
| Absolute error of selection of output values | yabserror | Minimum step at which output values can be varied | [0.001] | Array |
| Initial output increment | dparams | The magnitude of the change in the values of the outputs at the first selection step | [] | Array |
| Minimum values of input optimization criteria | umin | Lower limit of the target range of optimization criteria. Set as a linear array if there are more than one criteria | [0] | Array |
| Maximum values of input optimization criteria | umax | The upper limit of the target range of the optimization criteria. Set as a linear array if there are more than one criteria | [0.02] | Array |
| Type of total optimization criterion | usumtype | Method of criteria folding for the formation of the goal function ("Additive", "Quadratic", "Minimax", "Multiplicative") | Additive | Enumeration |
| Method of optimization | optmethod | Numerical optimization method used ("Search-2", "Search-4", "Simplex", "Method of the fastest descent", "Method of conjugate gradients") | Simplex | Enumeration |
| Maximum number of repetitive simulations in the calculation by the complete transient process | maxiter | The maximum number of repeated simulations during which the algorithm will try to select the optimal parameters. If at the end of the specified number of calculations, the values of the parameters that meet the optimization criteria were not found, then the calculation is interrupted. The option is only applicable if the optimization mode “By the complete transient process” is selected | 500 | Integer |
| Output of information about the optimization process | printoptinfo | Enabling the option means issuing information messages about the value of parameters and optimization criteria after each change in the system calculation process | None | Binary |
Parameters
The block has no parameters.
Examples
Examples of block application: