The block is designed to simulate a translatory motion lock, which consists of two translatory moving bodies. A locking mechanism is installed on one body (conditionally the case), and grooves for the lock are located on the second body (conditionally the rod). When the lock passes through the groove, a braking force is applied.
The relative linear position s in meters is calculated by the formula:
where:
sB and sF – positions of bodies at ports "B" and "F", respectively, m
sfix – linear position of the nearest lock, m
The braking force can be set analytically or tabularly. Analytically braking force F, N, is calculated by the formula:
where:
Fmax – maximum force, N
Δs – force range, rad
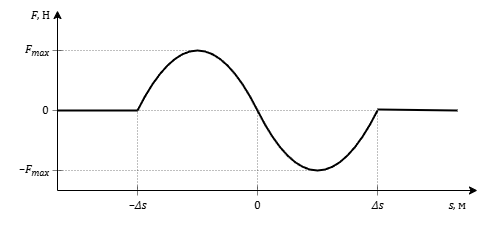
If the relative linear position is outside the force range, then the braking force is zero (Figure 1).
Figure 1. Dependence of the braking force on the relative linear position
Inputs
Name
Description
Communication line type
B
Port for connecting a conditionally fixed case
Translatory mechanics
F
Port for connecting a conditionally movable rod
Translatory mechanics
Outputs
None.
Properties
Name
Parameter
Description
By default
Data type
Position of locks
A group of properties that set the positions of the locks