Four-link mechanism
 |
 |
| C | |
| in the palette | on the schematic |
The block is designed to simulate a four-link mechanism consisting of a fixed base and two rotating bodies connected by a link of zero mass. The diagram of the mechanism is shown in the figure (Figure 1).
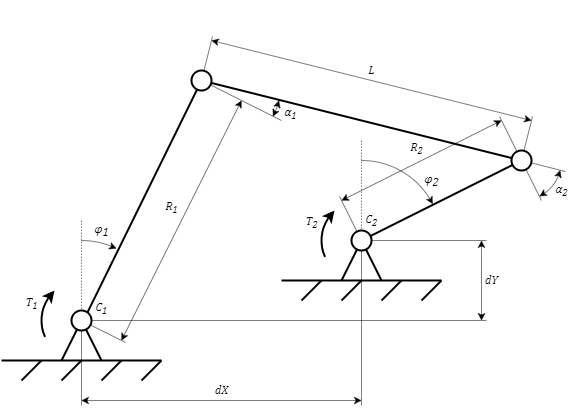
Figure 1. Four-link mechanism
The block is described by the following equations:




where:
- φ1 and φ2 – turn angles at ports "C1" and "C2", respectively, rad
- ω1 and ω2 – angular speeds at ports "C1" and "C2", respectively, rad/s
- εC and εR – angular accelerations at ports "C1" and "C2", respectively, rad/s2
- T1 and T2 – torques applied to ports "C1" and "C2", respectively, Nm
- dX and dY – distances between the axes of the hinges along the X and Y axes, m
- R1/R2 – lengths of links (Figure 1), m
- L – length of the inertia-free connector, m
- α1 and α2 – angles between links (Figure 1), rad
The block determines the torques T1 and T2 by solving the coupling equation.
The inertial characteristics of the links are set by external blocks Inertia or other similar ones.
Inputs
| Name | Description | Connection line type |
|---|---|---|
| C1 | Port for connecting model blocks to a rotating body | Rotary mechanics |
| C2 | Port for connecting model blocks to a rotating body | Rotary mechanics |
Outputs
None.
Properties
| Name | Parameter | Description | By default | Data type |
|---|---|---|---|---|
| Length of the 1st link | R1 | Length of the first link | 0.8 | Вещественное |
| Length of the 2nd link | R2 | Length of the second link | 0.4 | Вещественное |
| Distance along the X axis between the axes of the hinges, m | dX | Distance along the X axis between the axes of the hinges | 1 | Вещественное |
| Distance along the Y axis between the axes of the hinges, m | dY | Distance along the Y axis between the axes of the hinges | 0 | Вещественное |
| Time constant for solving the nonlinear algebraic equation, s | Tau | The time constant for solving the nonlinear algebraic equation. Used to solve the coupling equation | 0.1 | Вещественное |
| Show four-link mechanism | ShowPlot | Shows the four-link mechanism | None | Двоичное |
Parameters
| Name | Parameter | Description | Data type |
|---|---|---|---|
| Port С1 | A group of parameters displaying the parameters of rotary motion at the port "C1" | ||
| Turn angle, rad | Fi1 | Turn angle value at the port "C1" | Вещественное |
| Angular speed, rad/s | W1 | Angular speed value at the port "C1" | Вещественное |
| Angular acceleration, rad/s2 | Eps1 | Angular acceleration value at the port "C1" | Вещественное |
| Torque, Nm | T1 | Torque with which the block acts on the bodies connected to the port "C1" | Вещественное |
| Port С2 | A group of parameters displaying the parameters of rotary motion at the port "C2" | ||
| Turn angle, rad | Fi2 | Turn angle value at the port "C2" | Вещественное |
| Angular speed, rad/s | W2 | Angular speed value at the port "C2" | Вещественное |
| Angular acceleration, rad/s2 | Eps2 | Angular acceleration value at the port "C2" | Вещественное |
| Torque, Nm | T2 | Torque with which the block acts on the bodies connected to the port "C2" | Вещественное |
Examples
Examples of block application: