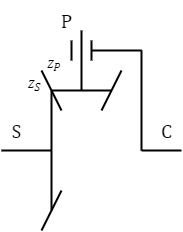
The block is designed to simulate planetary bevel gear mesh of the "Sun-Planet" type with a constant gear ratio and constant efficiency. The kinematic diagram of the gearbox is shown in the figure (Figure 1).
Figure 1. Kinematic diagram of the planetary bevel gear Sun-Planet
Planetary gear consists of:
Sun gear S with the number of teeth ZS
Planet gear P with the number of teeth ZP
Carrier C
The block is described by the following kinematic relation:
where:
ωS – angular speed of the sun gear, rad/s
ωC – angular speed of the carrier, rad/s
ωP – angular speed of the planet gear, rad/s
dir – value indicating the matching of the directions of rotation of the shafts of the sun gear and the planet gear, has a value of 1 or -1
To meet the requirement of the kinematic ratio, the block solves the coupling equation. A detailed description of the approach for the the gear (speed) ratios simulation is given on the page Simulating transmission. A detailed description of the approach for simulation losses in the gearing is given on the page Gearbox efficiency simulation.
Inputs
Name
Description
Connection line type
S
Port for connecting the sun gear shaft (sun)
Rotary mechanics
P
Port for connecting the planet gear shaft (planet)
Rotary mechanics
C
Port for connecting the carrier (carrier)
Rotary mechanics
Outputs
Name
Description
Connection line type
Q
Power losses due to bearing friction and gear meshing (efficiency)
Mathematical
Properties
Title
Parameter
Description
By default
Data type
Kinematics
A group of properties that set the kinematic parameters of motion
Allows you to define the mutual rotation direction of the sun gear and the planet gear. The possible values are: "Same direction", "Opposite direction"