Planetary gearbox with double-crowned planet gears
| C |
in the palette
on the schematic
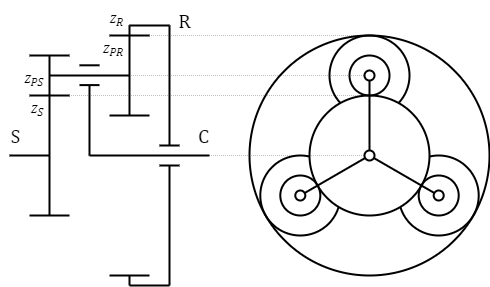
The block is designed to simulate a planetary gearbox with double-crowned planet gears having a constant gear ratio and constant efficiency. The kinematic diagram of the gearbox is shown in the figure (Figure 1).
Figure 1. Kinematic diagram of a planetary gearbox with double-crowned planet gears
The gearbox consists of:
Ring gear R with the number of teeth ZR
Sun gear S with the number of teeth ZS
Planet gears meshed with the sun gear PS having ZPSteeth
Planet gears meshed with the ring gear PR having ZPR teeth
Carrier C
The block is described by the following kinematic relation:
where:
ωS – angular speed of the sun gear, rad/s
ωC – angular speed of the carrier, rad/s
ωR – angular speed of the ring gear, rad/s
To meet the requirement of the kinematic ratio, the block solves the coupling equation. A detailed description of the approach for the the gear (speed) ratios simulation is given on the page Simulating transmission. A detailed description of the approach for simulation losses in the gearing is given on the page Gearbox efficiency simulation.
The gear ratio of the gearbox from the sun S to the carrier CUSC with the fixed ring gear R is determined by the formula:
where:
ZS – number of sun teeth
ZR – number of the gearbox ring gear teeth
ZPS – number of teeth of the planet gears meshed with the sun gear
ZPR – number of teeth of the planet gears meshed with the ring gear
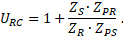
The gear ratio of the gearbox from the ring gear R to the carrier CURC with the fixed sun gear S is determined by the formula:
The block checks the so-called "assembly" condition of the gearbox.
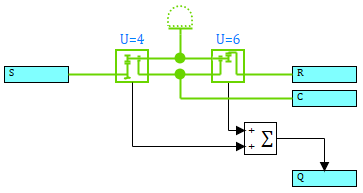
A block is a submodel that includes blocks (Figure 2):