Integrator with limitation and resetting of initial conditions
 |
 |
| Vectorized | C | |
in the palette |
on the schematic |
The block implements integration of the input signal(s) with limitation on the integral value and condition reset:
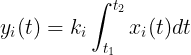
where xi(t) – elements of the input signal vector, yi(t) – elements of the output signal vector, t1 and t2 – switching times of initial conditions, ki – element of the gain vector. The block implements the mathematical model of the link, the dynamics of which is described by a linear ordinary differential equation (ODE) of the following form:

if there are limitations for the value of the output signal:

The block performs integration (within the limit range) of the input signal, so the block icon has the form of the transfer function of an ideal integrating link with the "addition" of the symbol "less-than-equal-to" and the word "reset". The dimensions of the input signal, output signal and coefficient vector must match.
where xi(t) – elements of the input signal vector, yi(t) – elements of the output signal vector, t1 and t2 – switching times of initial conditions, ki – element of the gain vector. The block implements the mathematical model of the link, the dynamics of which is described by a linear ordinary differential equation (ODE) of the following form:
if there are limitations for the value of the output signal:
The block performs integration (within the limit range) of the input signal, so the block icon has the form of the transfer function of an ideal integrating link with the "addition" of the symbol "less-than-equal-to" and the word "reset". The dimensions of the input signal, output signal and coefficient vector must match.
Inputs
- input - input of a signal being integrated;
- reset - command of value reset;
- Y0 - optional input for initial conditions.
Outputs
- output - integrated signal.
Properties
- Gain coefficients – vector of coefficients ki, by which the input value is multiplied;
- Initial conditions – vector of initial values yi(0) of the output value of the block;
- Minimum value – the minimum value of the output ymin;
- Maximum value – maximum output value ymax;
- Take initial conditions from - setting from where the block will read the initial conditions, namely: from the "Initial conditions" property, or from the additional input port Y0.
Parameters
- Dynamic variables - internal block condition variables;
- Derivatives - internal block condition variables.
Note:
by default the block implements integration of scalar input signal.
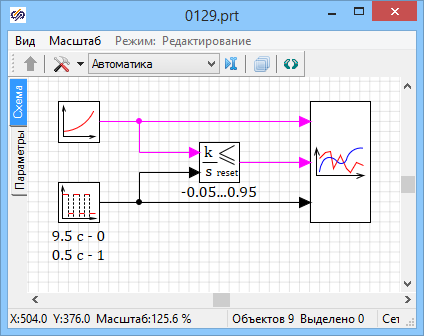
Example
Integration of a parabolic signal, with a limit on the integral value from -0.05 to 0.95. Every 10 seconds the initial conditions are reset to 0.1. Structural diagram:
Result:
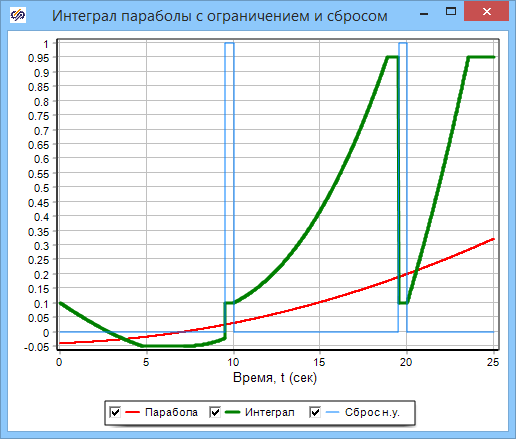
From the final plot, it can be seen that at times when the control signal (second port) is zero, the integral value is reset to the initial conditions equal to 0.1 in the example. When the control signal is zero, the integrator behaves like an integrator with limitations being imposed.
Result:
From the final plot, it can be seen that at times when the control signal (second port) is zero, the integral value is reset to the initial conditions equal to 0.1 in the example. When the control signal is zero, the integrator behaves like an integrator with limitations being imposed.