The block is designed to simulate the rotation of a mechanical element, the moment of inertia of which depends on its turn angle. The block calculates the angular acceleration of the body and, using integration, determines the angular speed and the turn angle of the body. The angular acceleration ε, rad/s2, is calculated by the formula:
where:
N – number of blocks connected to this block
Ti – torque coming from the i-th block, Nm
J – moment of inertia of the body, kg·m2
There are three ways to define the moment of inertia:
circular motion (runout)
elliptical motion (runout)
Tabularly defined moment of inertia
Circular runout
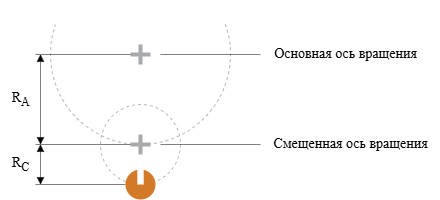
This method to define the variable moment of inertia simulates the rotation of the body around the displaced axis, which rotates around the main axis. The diagram of the mechanism is shown in the figure (Figure 1).
Figure 1. Circular runout diagram
Moment of inertia, kg·m2, of the body around the main axis is determined by the formula:
where:
J0 – moment of inertia of the body relative to the displaced (own) axis, kg·m2
M – body mass, kg
R – distance from the center of mass of the body to the main axis of rotation in meters which is calculated by the formula:
where:
φ – turn angle, rad
RC – radius of rotation around its own axis, m
RA – distance between the axes of rotation, m (Figure 1)
Elliptical runout
This method of defining the variable moment of inertia simulates a mechanism similar to the previous one, but the rotation of the body around its own axis is carried out along an elliptical trajectory. The diagram of the mechanism is shown in the figure (Figure 2).
Figure 2. Elliptical runout diagram
Moment of inertia of the body around the main axis is determined by the formula:
where R – distance from the center of mass of the body to the main axis of rotation in meters which is calculated by the formula:
where R1, R2 are the focal radii of the elliptical trajectory, m (Figure 2).
Tabularly defined moment of inertia
This method allows you to define an arbitrary law for changing the moment of inertia of the body depending on the turn angle. The moment of inertia is calculated by linear interpolation of a given table.
Inputs
Outputs
Name
Description
Connection line type
R
Port for connecting a conditionally moving shaft (rotor) to the rotating body.
Rotary mechanics
Properties
Name
Parameter
Description
By default
Data type
Runout type
model_type
Way to define the moment of inertia. The possible values are: “Circular runout", "Elliptical runout" and "Tabularly defined"
A group of properties that define the inertial characteristics of the body
Moment of inertia, kg·m2
J0
Moment of inertia of the body. The property is available when selecting the method of defining the moment of inertia as "Circular runout" or "Elliptical runout"
Distance between the main and displaced rotation axes. The property is available when selecting the method of defining the moment of inertia as "Circular runout" or "Elliptical runout"
Rotation radius parallel to the distance to the main axis, m
R1
Rotation radius parallel to the distance to the main axis. The property is available when selecting the method of defining the moment of inertia as "Elliptical runout"
Rotation radius perpendicular to the distance to the main axis, m
R2
Rotation radius perpendicular to the distance to the main axis. The property is available when selecting the method of defining the moment of inertia as "Elliptical runout"
An array of angle values, set in the range [0, 2·π]. The property is available when selecting the method of defining the moment of inertia as "Tabularly defined"